
动态规划-1
动态规划,英文:Dynamic Programming,简称DP,如果某一问题有很多重叠子问题,使用动态规划是最有效的。
所以动态规划中每一个状态一定是由上一个状态推导出来的,这一点就区分于贪心,贪心没有状态推导,而是从局部直接选最优的,
例如:有N件物品和一个最多能背重量为W 的背包。第i件物品的重量是weight[i],得到的价值是value[i] 。每件物品只能用一次,求解将哪些物品装入背包里物品价值总和最大。
动态规划中dp[j]是由dp[j-weight[i]]推导出来的,然后取max(dp[j], dp[j - weight[i]] + value[i])。
但如果是贪心呢,每次拿物品选一个最大的或者最小的就完事了,和上一个状态没有关系。
所以贪心解决不了动态规划的问题。
对于动态规划问题,我将拆解为如下五步曲,这五步都搞清楚了,才能说把动态规划真的掌握了!
确定dp数组(dp table)以及下标的含义
确定递推公式
dp数组如何初始化
确定遍历顺序
举例推导dp数组
509. 斐波那契数 - 力扣(LeetCode) (leetcode-cn.com)
斐波那契数 (通常用 F(n) 表示)形成的序列称为 斐波那契数列 。该数列由 0 和 1 开始,后面的每一项数字都是前面两项数字的和。也就是:
1 | F(0) = 0,F(1) = 1 |
给定 n ,请计算 F(n) 。
- 确定dp数组以及下标的含义,dp[i]的定义为:第i个数的斐波那契数值是dp[i]
- 确定递推公式:状态转移方程 dp[i] = dp[i - 1] + dp[i - 2];
- dp数组初始化:dp[0] = 0; dp[1] = 1;
- 确定遍历顺序:从递归公式dp[i] = dp[i - 1] + dp[i - 2];中可以看出,dp[i]是依赖 dp[i - 1] 和 dp[i - 2],那么遍历的顺序一定是从前到后遍历的
- 举例推导dp数组,按照这个递推公式dp[i] = dp[i - 1] + dp[i - 2],我们来推导一下,当N为10的时候…
1 | //时间复杂度:O(n) |
70. 爬楼梯 - 力扣(LeetCode) (leetcode-cn.com)
假设你正在爬楼梯。需要 n 阶你才能到达楼顶。
每次你可以爬 1 或 2 个台阶。你有多少种不同的方法可以爬到楼顶呢?
1 | 输入:n = 2 |
- 确定dp数组以及下标的含义:dp[i]: 爬到第i层楼梯,有dp[i]种方法
- 确定递推公式:dp[i] = dp[i - 1] + dp[i - 2] 。
- 初始化:dp[1] = 1,dp[2] = 2
- 遍历顺序:从前向后
- 举例模拟推导dp数组,证明正确
1 | //时间复杂度:$O(n)$ |
这道题目还可以继续深化,就是一步一个台阶,两个台阶,三个台阶,直到 m个台阶,有多少种方法爬到n阶楼顶。
这其实是一个完全背包问题,实现代码为:
1 | class Solution { |
746. 使用最小花费爬楼梯 - 力扣(LeetCode) (leetcode-cn.com)
给你一个整数数组 cost ,其中 cost[i] 是从楼梯第 i 个台阶向上爬需要支付的费用。一旦你支付此费用,即可选择向上爬一个或者两个台阶。
你可以选择从下标为 0 或下标为 1 的台阶开始爬楼梯。
1 | 请你计算并返回达到楼梯顶部的最低花费。 |
- dp[i]的定义:到达第i个台阶所花费的最少体力为dp[i]. (注意这里认为是第一步一定是要花费,最后一步不用花费)
- 状态转移方程:dp[i] = min(dp[i - 1], dp[i - 2]) + cost[i];
- dp数组初始化:dp[0] = cost[0]; dp[1] = cost[1];
- 遍历顺序从前到后
- 模拟验证dp数组是否正确。
1 | class Solution { |
62. 不同路径 - 力扣(LeetCode) (leetcode-cn.com)
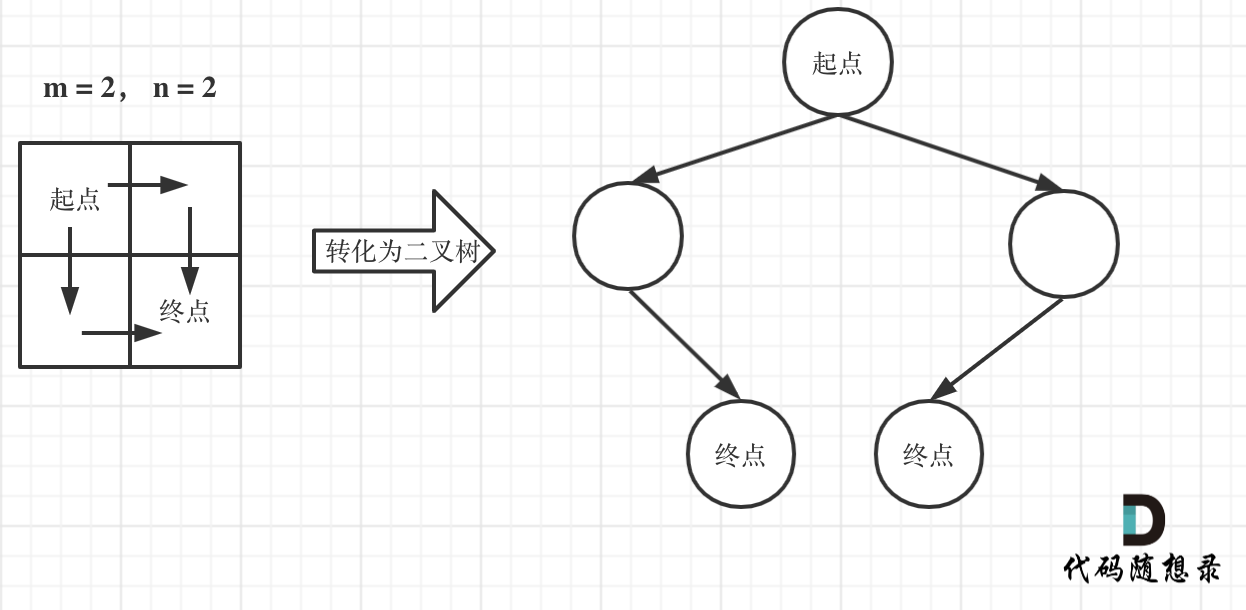
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径?
1 | 输入:m = 3, n = 2 |
方法一:这道题目,刚一看最直观的想法就是用图论里的深搜,来枚举出来有多少种路径。
注意题目中说机器人每次只能向下或者向右移动一步,那么其实机器人走过的路径可以抽象为一棵二叉树,而叶子节点就是终点!
1 | class Solution { |
来分析一下时间复杂度,这个深搜的算法,其实就是要遍历整个二叉树。
这棵树的深度其实就是m+n-1(深度按从1开始计算)。
那二叉树的节点个数就是 2^(m + n - 1) - 1。可以理解深搜的算法就是遍历了整个满二叉树(其实没有遍历整个满二叉树,只是近似而已)
所以上面深搜代码的时间复杂度为O(2^(m + n - 1) - 1),可以看出,这是指数级别的时间复杂度,是非常大的。
方法2:动态规划
- dp数组的定义:
dp[i][j]:表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。 - 递推公式:
dp[i][j]=dp[i - 1][j]+dp[i][j - 1] - 数组初始化:如何初始化呢,首先
dp[i][0]一定都是1,因为从(0, 0)的位置到(i, 0)的路径只有一条,那么dp[0][j]也同理。 - 从左到右即可
- 模拟检测dp数组是否正确。
1 | //时间复杂度:O(m × n) |
63. 不同路径 II - 力扣(LeetCode) (leetcode-cn.com)
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
1 | 输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]] |
这个题是上一个题的升级版,加入了障碍物。
1 | class Solution { |
343. 整数拆分 - 力扣(LeetCode) (leetcode-cn.com)
给定一个正整数 n ,将其拆分为 k 个 正整数 的和( k >= 2 ),并使这些整数的乘积最大化。
返回 你可以获得的最大乘积 。
1 | 输入: n = 2 |
动态规划五步:
- dp[i]表示拆分数字i,能够返回的最大乘积是dp[i].
- 确定递推公式。
dp[i] = max(dp[i], max((i - j) * j, dp[i - j] * j));也可以这么理解,j (i - j) 是单纯的把整数拆分为两个数相乘,而j dp[i - j]是拆分成两个以及两个以上的个数相乘。然后再取随着j变化最大的dp. - dp[2] = 1
- 遍历顺序从前向后,i从3到n,j从1到i - 1
- 模拟检测dp数组是否正确。
1 | //时间复杂度:O(n^2) |
96. 不同的二叉搜索树 - 力扣(LeetCode) (leetcode-cn.com)
给你一个整数 n ,求恰由 n 个节点组成且节点值从 1 到 n 互不相同的 二叉搜索树 有多少种?返回满足题意的二叉搜索树的种数。
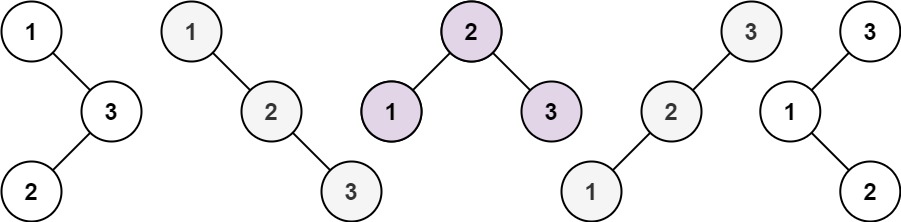
1 | 输入:n = 3 |
- 确定dp数组(dp table)以及下标的含义:dp[i] : 1到i为节点组成的二叉搜索树的个数为dp[i]。

元素1为头结点搜索树的数量 = 右子树有2个元素的搜索树数量 * 左子树有0个元素的搜索树数量
元素2为头结点搜索树的数量 = 右子树有1个元素的搜索树数量 * 左子树有1个元素的搜索树数量
元素3为头结点搜索树的数量 = 右子树有0个元素的搜索树数量 * 左子树有2个元素的搜索树数量
- 递推公式:dp[3] = dp[2] dp[0] + dp[1] dp[1] + dp[0] * dp[2]
- 初始化dp[0] = 1
- 遍历顺序:遍历i里面每一个数作为头结点的状态,用j来遍历。
- 模拟检测dp数组是否正确。
1 | //时间复杂度:$O(n^2)$ |